見まね学習への新しいアプローチ
研究目的
もしロボットが人間の動作を適切に見まねできるとしたら、ロボットは非常に容易に新しい行動パターンを獲得できます。しかし一般に、視覚情報を介した見まねは非常に難しく、従来の見まねシステムでは複雑かつ高精度な課題は行えません。そこで私たちはそのような問題を克服するための新しい見まね手法を提案します。この新しい手法はヒトの運動学習能力を利用します。アイデアの鍵はロボットをヒトが直感的に操作できるデバイスと見なすことです。ヒトがロボットを自由自在に操作できれば、ヒトはロボットを介して課題学習を行えます。ロボットを介してヒトが課題を成功させると言うことは、ヒトがロボットに必要な制御コマンドを学習することになり、その学習結果を用いることで自律制御のためのコントローラ設計が容易になると期待できるのです。
私たちの手法を用いることで、学習初期においてロボットはヒトの手助けを必要としますが、最終的にはヒトを必要とせず複雑で正確な課題を自律的に行えるようになります。ヒトは新しいデバイスへの適応能力が非常に高く、一定の練習を行えば無意識かつ自由自在に操作できるようになります。例えば熟練者による車の運転を見ると、手足の動きと車のダイナミクスは自然に同調しています。この事実は私たちが過去に行った研究[1,2]にて検証されています。また霊長類における手足の制御は非常に高い柔軟性を持っており、未知のデバイスへすばやく適応できることが神経生理学の実験において示唆されています[3,4]。
つまり私たちのアプローチは、複雑な運動課題に対するロボットコントローラを生成する際、ヒトの高い適応能力を積極的に利用するものであります。提案手法は(1)直感的なインターフェイスを介してヒトがロボットを操作し課題の練習を行う、(2)ヒトが課題を成功させた時の軌道データを元にしてロボットのコントローラを生成する、と言うように2つの段階から構成されています。
ボールスワッピング課題への適用
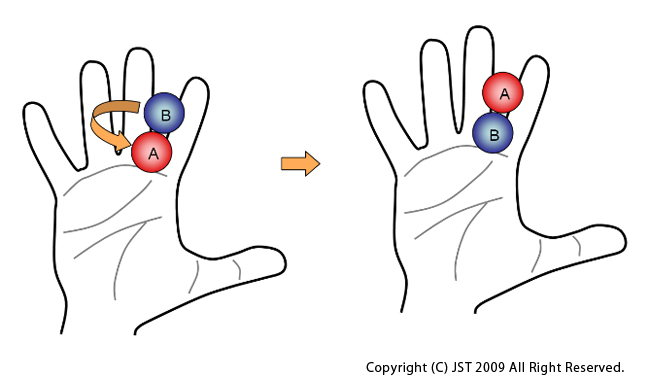
ボールスワッピングとは右図の様に(IMG1参照)、手の上で2つのボールの位置を交互に入れ替える課題です。ヒトは短い練習によって簡単にこの課題をこなすことが出来ます。私たちは16の自由度を持つGifu Hand III(ダイニチ社製)にボールスワッピング課題を行わせるため、提案手法を用いた実験を行いました。
モーションキャプチャのマーカーをヒトの手と指に取り付け、ヒトの動作がロボットにリアルタイムで反映されるシステムを構築しました(動画右上参照)。この構築したシステムによってヒトはロボットの指を非常に直感的に操作できます。直感的なインターフェイスにとって重要なポイントは制御デバイスとロボットの間の関係です。我々が用いたインターフェイスによって、ヒトはロボットの指をあたかも自分のものであるかの様に操作できるようになり、ロボットハンドを用いた把持や指差しと言った運動を容易に行えます。つまりロボットがヒトの身体座標系に取り込まれたと言えるでしょう。

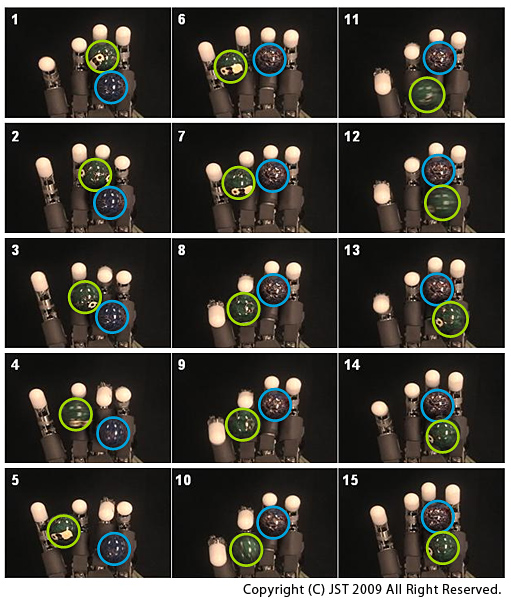
このシステムを用いて被験者にロボットの操作を行わせ、ボールスワッピング課題を行うように指示しました(動画左参照)。ボールを落とさず課題を行えるようになるまで、1週間のトレーニングを要しました(1日2時間程度)。そして被験者による軌道データをそのまま用いるか、もしくは速度や滑らかさの調節を行った後、ボールスワッピングのためのオープンループコントローラを生成しました。そうして得られたコントローラによるボールスワッピング課題の1周期を上図に示します(IMG2参照)。(提案手法の詳細は文献[1,2]を参照)
参考文献
[1] Oztop, E., Lin, L.-H., Kawato, M., & Cheng, G. Dexterous skills transfer by extending human body schema to a robotic hand, In IEEE-RAS International Conference on Humanoid Robots, pp. 82-87, Genova, Italy (2006).
[2] Oztop, E., Lin, L.-H., Kawato, M., & Cheng, G. Extensive human training for robot skill synthesis: Validation on a robotic hand, In IEEE International Conference on Robotics and Automation, pp. 1788-1793, Rome, Italy (2007).
[3] Iriki, A., Tanaka, M., Iwamura, Y. Coding of Modified Body Schema During Tool Use by Macaque Postcentral Neurones, In Neuroreport, vol.7, pp. 2325-30 (1996).
[4] Obayashi, S., Suhara, T., Kawabe, K., Okauchi, T., Maeda, J., Akine, Y., Onoe, H., & Iriki, A. Functional Brain Mapping of Monkey Tool Use, In Neuroimage, vol. 14, pp. 853-61 (2001).
Copyright © 2009 JST All Rights Reserved.