Humanoid Robot
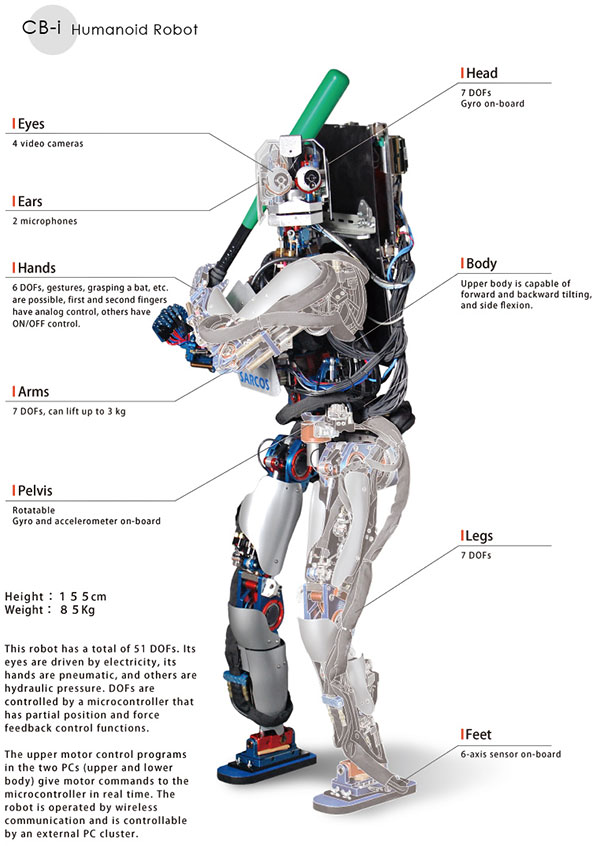
This robot has a total of 51 DOFs. Its eyes are driven by electricity, its hands are pneumatic, and others are hydraulic pressure. DOFs are controlled by a microcontroller that has partial position and force feedback control functions. The upper motor control programs in the two PCs (upper and lower body) give motor commands to the microcontroller in realtime. The robot is operated by wireless communication and is controllable by an external PC cluster.
- Height:155cm
- Weight:85kg
- Type:Humanoid Robot
- Head:7DOFs. Gyro on-board.
- Eyes:4video cameras
- Ears:2microphones
- Body:Upper body is capable of forward and backward tilting, and side flexion.
- Arm:7DOFs, can lift up to 3 kg
- Hand:6DOFs, gestures, grasping a bat, etc. are possible, first and second fingers have analog control, other have ON/OFF control.
- Pelvis:Rotatable. Gyro and accelerometer on-board.
- Legs:7DOFs
- Feet:6-axis sensor on-boar
Reinforcement Learning of Phase Oscillators for Fast Adaptation to Moving Targets
Conference on Robot Learning (CoRL) 2018

