玄 相昊(げん そうこう)
Sang-Ho Hyon
博士(工学)

2) ATR 脳情報研究所 客員研究員
| Email: |  or or  |
| Phone: | 0774-95-2690 |
| Fax: | 0774-95-1236 (研究所共通) |
| Address: | 〒619-0288 京都府相楽郡精華町光台2-2-2 ATR 脳情報研究所 |
2002年 3月 東京工業大学大学院理工学研究科博士課程(制御工学専攻)修了
−手を用いた人間追従歩行―" (指導教官:高西淳夫 教授).
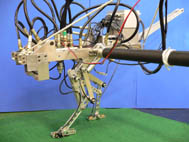
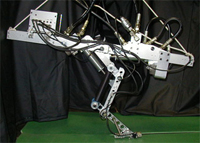
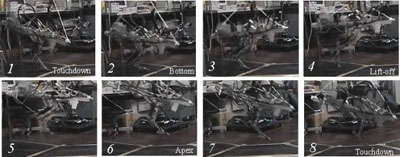
2002年 3月 東京工業大学 博士論文,"1脚走行ロボットの開発と制御" (指導教官:美多勉 教授).
2003年 4月 東北大学助手 大学院工学研究科 バイオロボティクス専攻 (改組による)
2005年 1月 東北大学講師 大学院工学研究科 バイオロボティクス専攻
2005年 4月 ATR 脳情報研究所 研究員
2005年 4月 科学技術振興機構 ICORP 計算脳プロジェクト 研究員(2009年3月まで)
2008年 4月 ATR 脳情報研究所 BRI研究室 室長代理(2010年3月まで)
2009年 4月 情報通信研究機構 未来ICT研究センター バイオICTグループ 専門研究員(2010年3月まで)
2010年 4月 立命館大学理工学部ロボティクス学科 准教授
2010年 4月 ATR 脳情報研究所 客員研究員