ヒューマノイドロボット
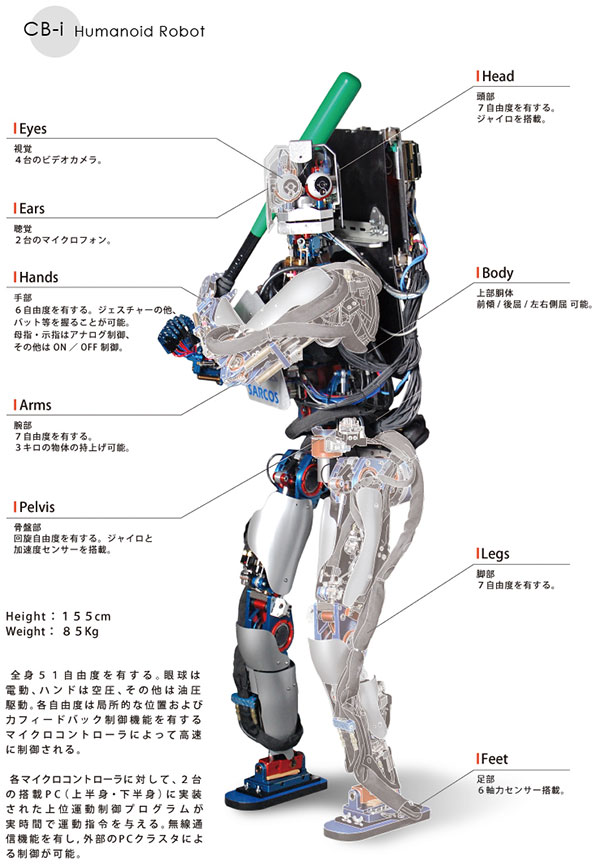
全身51自由度を有する。眼球は電動、ハンドは空圧、その他は油圧駆動。各自由度は局所的な位置および力フィードバック制御機能を有するマイクロコントローラーによって高速に制御される。各マイクロコントローラに対して、2台の搭載PC(上半身・下半身)に実装された上位運動制御プログラムが実時間で運動指令を与える。無線通信機能を有し、外部のPCクラスタによる制御が可能。
- DOF:51自由度
- Height:155cm
- Weight:85kg
- Type:ヒューマノイドロボット
- Head(頭部):7自由度を有する。ジャイロを搭載。
- Eyes(視覚):4台のビデオカメラ
- Ears(聴覚):2台のマイクロフォン
- Body(上部胴体):前傾/後屈/左右側屈が可能。
- Arm(腕部):7自由度を有する。3キロの物体の持ち上げ可能。
- Hand(手部):6自由度を有する。ジェスチャーの他、バット等を握ることが可能。母指・示指はアナログ制御、その他はON/OFF制御。
- Pelvis(骨盤部):回旋自由度を有する。ジャイロと加速度センサーを搭載。
- Legs(脚部):7自由度を有する。
- Feet(足部):6軸力センサーを搭載。
Reinforcement Learning of Phase Oscillators for Fast Adaptation to Moving Targets
Conference on Robot Learning (CoRL) 2018

