

ATRに出向していたNTTの五味裕章さんらと発展させた小脳内部モデル[1,2]、ATRに私を招いて下さった乾敏郎先生と提案した順逆光学モデル[3]、Daniel Wolpertさんらと提案しNeural Networks誌に掲載したMOSAIC[4]などがあります。

ロボットに脳のモデルを埋め込むと言う斬新なパラダイムを、ERATO学習動態プロジェクトのグループリーダを務めてくれたStefan Schaalさん、ICORP計算脳プロジェクトの米国側の相方のChristopher AtkesonさんとグループリーダのGordon Chengさん等と構築しました[5]。現在ATR脳情報研究所ブレインロボットインタフェース研究室・室長の森本淳さんがMiguel Nicolelisさんと行った、Duke大学のサルとATRのヒューマノイドをインターネットで双方向に繋いで、ブレインマシンインタフェースによって歩行させる実験が印象深かったです[6]。

様々な計算モデルを実験で検証することや、理論にもとづく実験を行う事が出来ました。当時電総研におられた河野憲二先生の研究グループと共同で小脳内部モデル仮説を検証することが出来たのはとても幸運でした[7,8]。五味裕章さん、大須理英子さんやEtienne Burdetさんらとはロボットマニピュランダム[9,10]、今水寛さん等とはfMRI[11]を用いた実験にも手を付けるようになり、強化学習モデルに基づくfMRI実験については、私と銅谷賢治さん、春野雅彦さんが、世界で初めてcomputational model based neuroimagingと言う用語を使いました [12,13]。

超多次元のデータを多数のサンプルについて計測し、機械学習を応用して脳科学を精密科学にするという方向性が有望だと感じています。例えば安静時脳活動を複数のモダリティーで長時間計測する精密な実験、患者さんを含む2千人の脳ビッグデータ[14]、David Marr流の計算理論と脳ダイナミクスモデルが初めて統合される兆しがあること、柴田和久さん、渡邊武郎先生、佐々木由香先生と共同で開発したDecoded Neurofeedback[15]や、福田めぐみさんが中心になって開発したFunctional Connectivity Neurofeedback[16]などの新しいツールを用いて脳活動から心への因果関係を明らかに出来る神経科学を構築したいと考えています[17]。
[1] Kawato, M., Furukawa, K., Suzuki, R. (1987): A hierarchical neural-network model for control and learning of voluntary movement, Biological Cybernetics, Vol.57, pp.169-185.
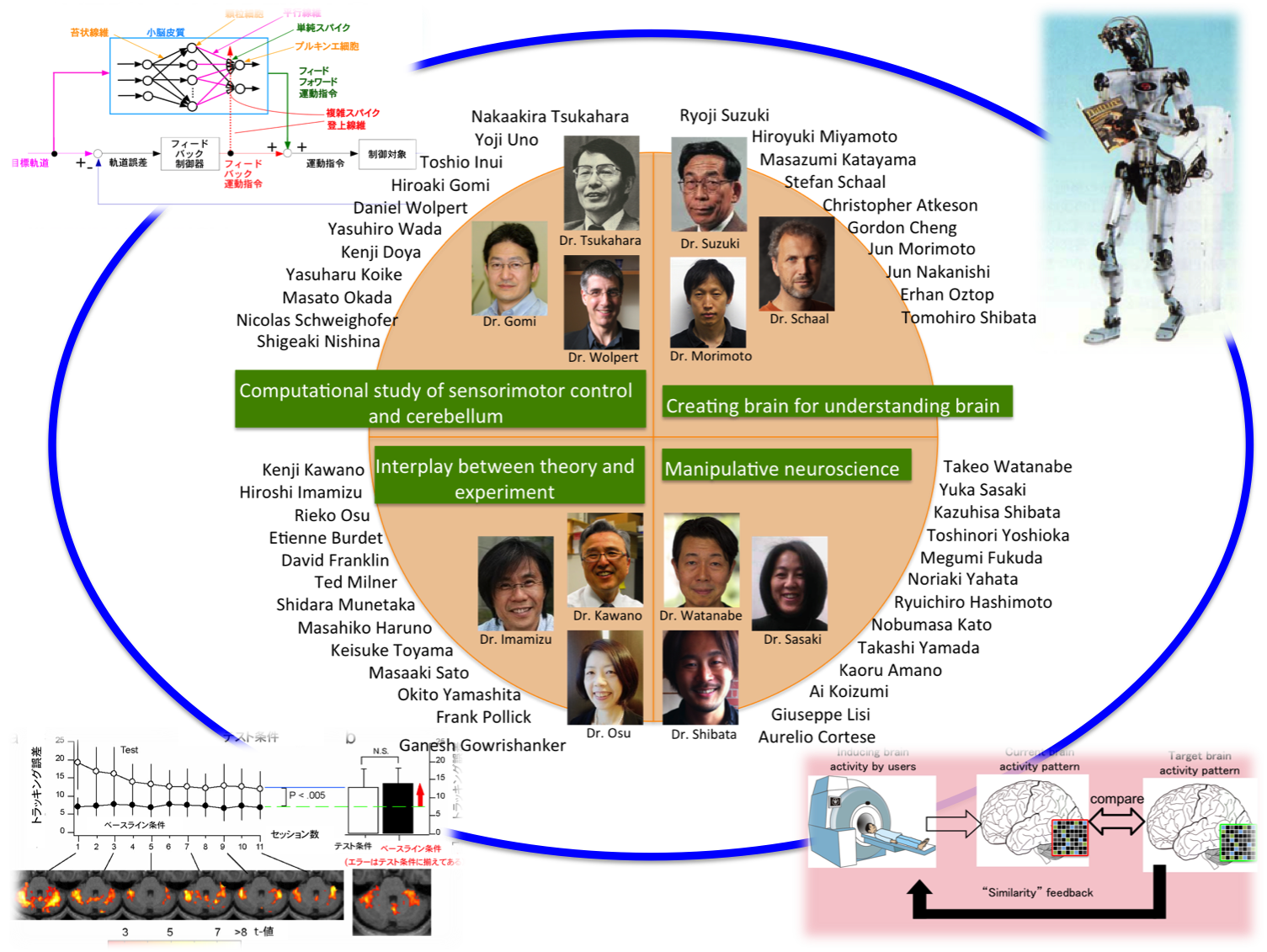
Computational Study of the Brain: From Sensory-Motor Integration to Communication
Computational Neuroscience
Neuroscience, the discipline which studies structures and functions of the brain, has developed enormously in the past 50 years. Unfortunately, its major successes are limited to elucidating brain loci responsible for some functions, and identifying substances included in some brain processes. We are still quite ignorant about information representations in the brain, as well as about information processing in the brain for specific computations. If we had enough knowledge about these, we would be able to build artificial machines or computer programs that could solve difficult problems such as visual information processing, smooth and dexterous motor control, or natural language processing. After reflecting on these past failures of conventional neuroscience research, we adopted the computational approach. That is, we construct a brain in order to understand the brain, and we understand the brain through building a brain and to the extent that we can build a brain. More concretely, we investigated the information processing of the brain with the long-term goal that machines, either computer programs or robots, could solve the same computational problems as those that the human brain solves, while using essentially the same principles (ref 1). With these general approaches, we made progresses in elucidating visual information processing, optimal control principles for arm trajectory planning, internal models in the cerebellum, teaching by demonstration for robots (ref 1), human interfaces based on electoromyogram, applications in rehabilitation medicine, and so on. Because of space limitations, I explain here only internal models and robot learning.
Internal Models in the Cerebellum
Internal models are neural networks within the brain that mimic input-output transformation of some dynamical processes in the external (to the brain) world (ref 2). We postulated that the cerebellum acquires internal models of motor apparatus through motor learning. Our specific theory called feedback-error-learning model predicts that the climbing fiber inputs encode the error signal in the motor-command coordinates, and the cerebellar cortex acquires the inverse dynamics model by changing synaptic weights between parallel-fiber inputs and Purkinje cells. These predictions have been confirmed by monkey physiological experiments (ref 1,3), human behavioral experiments (ref 4,5), and human brain imaging (ref 6,7). It is now generally accepted that cerebellar internal models are important not only for sensory-motor integration, but also for human cognitive functions (ref 1,3,8).
Robot Learning by watching
Brain functions cannot be studied dealing with only the brain. We also need to reproduce bodies and surrounding environments. Then, it is obvious that robotics research is very much related. In the past, this scientific objective of robotics to elucidate information processing of human intelligence has not been emphasized. Furthermore, on the contrary, this objective was even hidden, made implicit or neglected. We have developed a humanoid robot DB for computational neuroscience research with the help from SARCOS. DB is quick in movements, very compliant, with the same dimension and weight with humans, and possesses 30 degrees of freedom. It has four cameras, artificial vestibular sensor, joint angle sensors and force sensors for all the actuators (DB’s Home page). DB now can demonstrate 24 different behaviors. They are classified into 3 main classes. The first class is learning from demonstration (1) Okinawa Dance Imitation (Kachyaasi), (2) Rock’n Roll Dance Imitation, (3) Pole Balancing Imitation, (4) Tennis Swing Imitation, (5) Real-Time Visual Tracking of Human Motion, (6) Punching Imitation, (7) Juggling, (8) Devil Stick, (9) Real-Time Hand Movement Imitation, (10) Air Hockey Imitation, (11) Tumbling a box, (12) Moving a small box and Robota. The second class is eye movements, and includes (13) VOR Adaptation. (14) Smooth Pursuit Learning, (15) Saccade, (16) Combination of 3 Eye Movement Primitives. The third class depends on task dynamics, physical interaction, and learning (17) Paddling, (18) Learning of Visuo-Motor Transformation, (19) Catching a Ball, (20) Drumming Joint-Performance, (21) Sticky Hand, (22) Non-Calibrated Visuo-Motor Transformation, (23) Yo-yo and Slinky, (24) Flexible Object Manipulation. Essential computational principles of some of these demonstrations are (A) cerebellar internal models, (B) reinforcement learning in the basal ganglia, and (C) cerebral stochastic internal model.
1. Kawato M: From ” Understanding the brain by creating the brain” toward Manipulative Neuroscience.” Philosophical Transactions of the Royal Society B (2007)
2. Kawato M: Internal models for motor control and trajectory planning. Current Opinion in Neurobiology, 9,718-727(1999). (c) Elsevier Science Ltd.
3. Shidara M, Kawano K, Gomi H, Kawato M: Inverse-dynamics model eye movement control by Purkinje cells in the cerebellum. Nature 365,50-52(1993).
4. Gomi H, Kawato M: Equilibrium-point control hypothesis examined by measured arm-stiffness during multi-joint movement. Science 272,117-120(1996).
5. Burdet E, Osu R, Franklin D, Milner T, Kawato M: The central nervous system stabilizes unstable dynamics by learning optimal impedance. Nature, 414,446-449(2001). (c) Macmillan Magazines Ltd.
6. Imamizu H, Miyauchi S, Tamada T, Sasaki Y, Takino R, Puetz B, Yoshioka T, Kawato M: Human cerebellar activity reflecting an acquired internal model of a novel tool. Nature, 403,192-195(2000).
(c) Macmillan Magazines Ltd.
7. Imamizu H, Kuroda T, Miyauchi S, Yoshioka T, Kawato M: Modular organization of internal models of tools in the human cerebellum. Proc Natl Acad Sci USA., 100,5461-5466 (2003).(c) PNAS.
8. Wolpert D, Kawato M: Multiple paired forward and inverse models for motor control. Neural Networks 11,1317-1329(1998). (c) Elsevier Science Ltd.
9. Kawato M: Brain controlled robots. HFSP Journal, 2(3), 136-142 (2008)